
 中文
中文
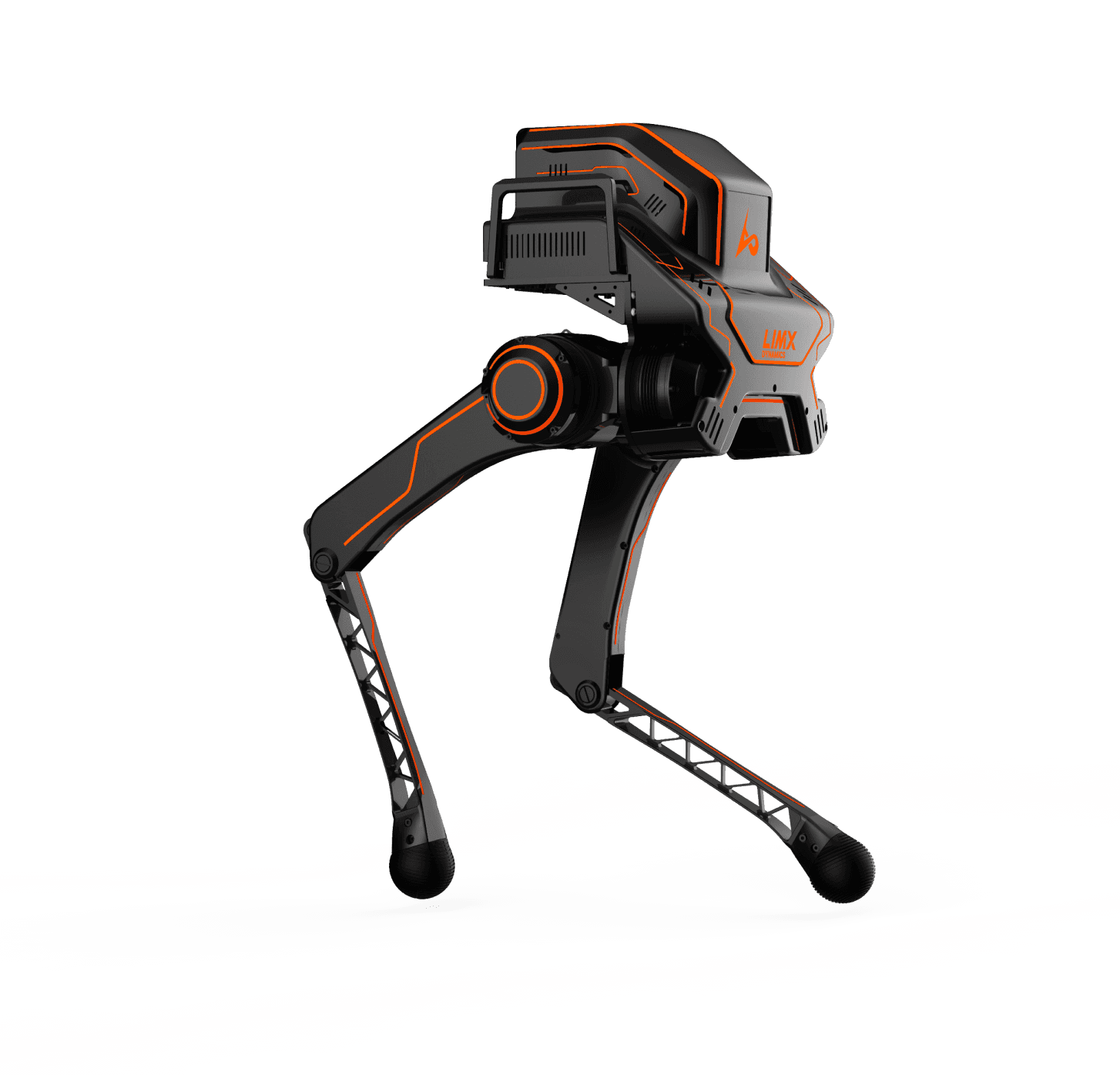
P1
Biped Robot
As the first biped conquers the wild based on RL, P1 provides stable gait walking in complex environments. High-performing joint modules, high-frequency real-time communications, and simple software development interfaces provide a reliable, efficient, and easy-to-use test platform for developing bipedal locomotion control algorithm.
Contact Sales
Real2Sim2Real Closed-Loop
- Close the loop between simulation and hardware deployment
- Automate the entire process, minimize manual intervention, bridge the gap between simulation and reality

Neural Network Architecture Design
- The architecture effectively deals with massive interference
- Generate adaptive control policies
- The same network is applicable to different robots & scenarios

Data Generation Mechanism & Training Algorithm Design
- Propose Iterative Pre-training methodology
- Efficiently produce and collect valid data to train high-performance policies
PARAMETERS
BASICS
Current Dimensions
390mm * 395mm * 780mm
Net Weight
≤20kg
BATTERY
Output Voltage
48V
Output Power
1000W
Swappable
✓
Type
Ternary Lithium
Capacity
5AH/240Wh
Endurance (Rated)
≥2h
Charging Time
1.5~2h
PERFORMANCE
Effective Load (Rated)
About 10kg (up to 15kg)
Speed
≥0.5m/s
Climbing Angle
≥5°
Drop Height
20cm
Embedded System
11th Gen i7/16GB/512GB Wi-Fi6
JOINT ACTUATORS
Rated Voltage
48V
Rated Torque
30Nm
Peak Torque
80Nm
Peak Speed
15rad/s
SENSORS
RGBD Camera
✓
IMU
✓
EXPANDIBILITY
Peripherals
1 * Type-C (Full-featured) 1 * Gigabit network port
External Power Supply
24V
DEV TOOLS
Custom Dev
✓
SDK
✓
Data Viz Tool
✓
Data Logging & Playback
✓
Joint Control Algorithm
✓
Simulator
Gazebo, MuJoCo, Isaac Gym
VIDEOS
LimX Dynamics’ Biped Robot P1 Conquers the Wild Based on Reinforcement Learning
Contact us:
Corporate: contactus@limxdynamics.com
Address: 15th Floor, Building E, Nanshan I Valley, Shenzhen, China
Contact Sales:
Follow us



